Monte Carlo 蒙特卡洛模拟,简称 MC.
Markov Chain Monte Carlo 是用马尔科夫链采样的蒙特卡洛模拟,简称 MCMC.
Monte Carlo 模拟
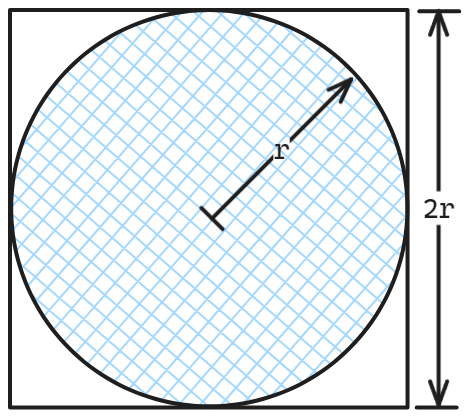
这个比较简单了,举个例子,要计算 π 的近似值,可以在一块正方形板子里画一个内接圆,然后以均匀的概率往正方形里一粒一粒地扔沙子,每扔一粒,就判断并且记录这里沙子在圆内还是圆外,然后把沙子吹掉,如此往复。圆的面积是 πr²,正方形的面积是 4r²,所以落在圆内的概率(圆内沙子的数量和总数的比值)乘 4,就是所求。
归纳一下:当问题的解用一个随机变量的概率分布、期望值、二阶矩……等等来表示的时候,就生成一个符合该概率分布的随机样本,用样本的统计量去近似原概率分布。
Markov Chain Monte Carlo
但是前述例子有一个步骤,就是我们往板子上扔完沙子要把沙子吹掉,每粒沙子,每次扔沙子之间也应该看不出区别,这是为了保证取样之间相互独立且来自同一个概率分布。
但是很多取样过程无法满足这种条件,或者达成条件所需的成本很高。比如计算一个高斯积分 \(\int_{-\infty}^{+\infty}e^{-x^2}dx\),被积函数的取值范围涵盖整个实数集,想找一个在整个实数集上均匀分布的随机数发生器就比较难了。
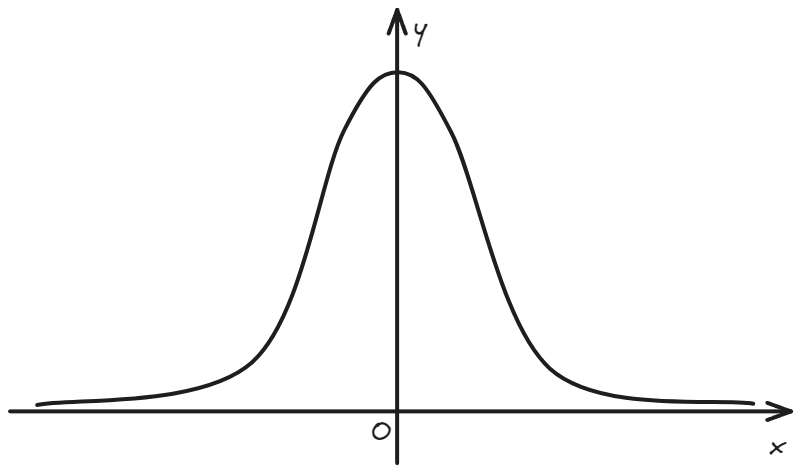
但是学过物理的朋友应该知道,上面的被积函数是以狄拉克 δ(x) 函数为初值条件的一个扩散方程的解,在某一时刻的空间分布。(不想凑系数了,将就看吧)
而扩散方程又是随机游走 (random walk) 在连续近似下的极限。
所以我们直接模拟一堆粒子从原点出发作随机行走,向两个方向的概率相同,扩散系数以及积分里的常数对齐,统计粒子在整个过程中出现在不同 x 位置的频率,求和之后乘以步长就是积分结果。这个过程需要的随机数发生器容易获取得多,是一个以 0.5 为阈值的 [0,1) 的均匀分布,比如一个均匀硬币。
而随机行走过程中走完每一步的位置,都只取决于前一步的位置,而与更久远的历史无关——这样的过程叫做马尔可夫过程。用这种方法取样获得随机样本的蒙特卡洛模拟,就是 MCMC.
扩散方程和随机行走只是 MCMC 的一个很特殊很特殊的例子,而对于一般的 MCMC 模拟,有以下通用的 Markov Chain 采样的算法:
Metropolis-Hastings 算法
已知一个随机变量 x, 和一个与目标概率分布 P(x) 成正比的函数 f(x)(不要求 f 归一化)
- 初始化
- 选定初始采样点 \(x_0\)
- 选定一个采样函数 proposal function,也就是在已知当前 x 的取值时,下一个 x’ 取值的概率分布 \(g(x’\vert x)\);其中对于 Metropolis 算法,这个采样函数是对称的:\(g(x’\vert x)=g(x\vert x’)\). 常用以两者之差为宗量的高斯函数。
- 在得出 t 时刻的 \(x_t\) 之后:
- 根据 \(g(x'\vert x_t)\) 抽样得到一个 x’
- 计算 α = f(x’)/f(x) = P(x’)/P(x)
- 决定是否将 x’ 加入样本
- 如果 α ≥ 1, 直接加入
- 如果 α < 1, 以 α 为概率加入
这种方法不保证采样的早期样本也符合目标概率分布,所以一般会抛弃最先加入的若干样本。
Gibbs 采样
只是一种思路,不算是完整的算法。
当被采样的随机变量是一个多维向量的情况,在不使用 Gibbs 采样的情况下,在迭代的某一步骤 t,每个分量都应该是前一步骤的函数:\(x_{i,t}=f(\{x_{j,\ t-1}\})\)
而 Gibbs 采样就是说,不必让每个维度 i 都根据前一个步骤的分量来取值,可以把当前 t 已经取样出来的分量直接带入到本回合后面的维度:\(x_{i,t}=f(\{x_{j,\ t}\}_{j<i}\cup\{x_{k,\ t-1}\}_{k\ge i})\)